开源项目阅读05imutils¶
基础¶
功能¶
imutils 是一个图像处理工具包,它对 opencv 的一些方法进行了二次加工,使其更加简单易用。相比较于 opencv 的学习难度,导致很多方法使用起来需要一定的基础,新手可能会起步的较慢,而 imutils 使用起来比较便利,能够辅助我们理解 opencv
代码量¶

用法¶
查询opencv中的函数¶
可以使用关键词搜索opencv中的相应函数
import imutils
imutils.find_function("area")
#output:
1. CC_STAT_AREA
2. INTER_AREA
3. contourArea
4. minAreaRect
图像平移Translation¶
图像在x轴方向左右平移,y轴方向上下平移,
#向右平移25像素,向上平移75像素
translated = imutils.translate(image,25,-75)
图像旋转Rotation¶
rotated = imutils.rotate(image,90)
图像大小Resizing¶
改变图像大小,但保持原来图像的长宽比不变。
可以只单独设置width或者height;
resized = imutils.resize(image,width=300)
resized = imutils.resize(image,height=300)
骨架化Skeletonization¶
gray = cv2.cvtColor(logo, cv2.COLOR_BGR2GRAY)
skeleton = imutils.skeletonize(gray, size=(3, 3))
cv2.imshow("Skeleton", skeleton)
URL转换为Image¶
image = imutils.url_to_image(url)
自动边缘检测Automatic Canny Edge Detection
gray = cv2.cvtColor(logo, cv2.COLOR_BGR2GRAY)
edgeMap = imutils.auto_canny(gray)
#源码
def auto_canny(image, sigma=0.33):
# compute the median of the single channel pixel intensities
v = np.median(image)
# apply automatic Canny edge detection using the computed median
lower = int(max(0, (1.0 - sigma) * v))
upper = int(min(255, (1.0 + sigma) * v))
edged = cv2.Canny(image, lower, upper)
# return the edged image
return edged
深度阅读(略)¶
广度阅读¶
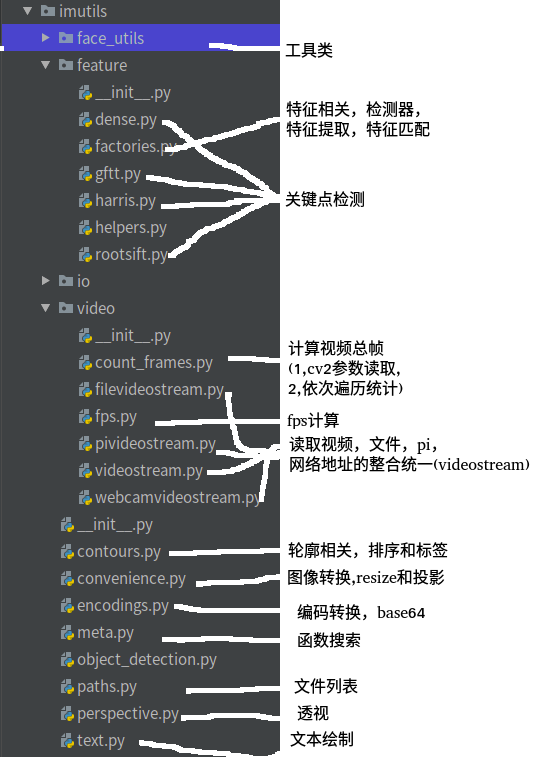
dense¶
class DENSE:
def detect(self, img):
kps = []
for x in range(0, img.shape[1], self.step):
for y in range(0, img.shape[0], self.step):
# create a keypoint and add it to the keypoints list
kps.append(cv2.KeyPoint(x, y, self.radius))
cv2.KeyPoint是opencv中关键点检测函数detectAndCompute()返回的关键点的类,他包含关键点的位置,方向等属性
gftt¶
class GFTT:
def detect(self, img):
cnrs = cv2.goodFeaturesToTrack(img, self.maxCorners, self.qualityLevel, self.minDistance,
mask=self.mask, blockSize=self.blockSize,
useHarrisDetector=self.useHarrisDetector, k=self.k)
return corners_to_keypoints(cnrs)
def corners_to_keypoints(corners):
"""function to take the corners from cv2.GoodFeaturesToTrack and return cv2.KeyPoints"""
if corners is None:
keypoints = []
else:
keypoints = [cv2.KeyPoint(kp[0][0], kp[0][1], 1) for kp in corners]
return keypoints
cv::goodFeaturesToTrack(),它不仅支持Harris角点检测,也支持Shi Tomasi算法的角点检测。但是,该函数检测到的角点依然是像素级别的,若想获取更为精细的角点坐标,则需要调用cv::cornerSubPix()函数进一步细化处理,即亚像素。
harris¶
class HARRIS:
def detect(self, img):
gray = np.float32(img)
H = cv2.cornerHarris(gray, self.blockSize, self.apertureSize, self.k)
kps = np.argwhere(H > self.T * H.max())
kps = [cv2.KeyPoint(pt[1], pt[0], 3) for pt in kps]
return kps
函数主要用于检测图像的哈里斯(Harris)角点检测,
factories¶
if is_cv2():
def FeatureDetector_create(method):
method = method.upper()
if method == "DENSE":
return DENSE()
elif method == "GFTT":
return GFTT()
elif method == "HARRIS":
return HARRIS()
return cv2.FeatureDetector_create(method)
def DescriptorExtractor_create(method):
method = method.upper()
if method == "ROOTSIFT":
return RootSIFT()
return cv2.DescriptorExtractor_create(method)
def DescriptorMatcher_create(method):
return cv2.DescriptorMatcher_create(method)
评价¶
整体比较简单,目前估计已经不在维护了(有40+个pull request了,猜测属于无人管理状态),封装后的接口更易用,但也带来一定学习成本。建议当做opencv的学习材料阅读下即可,熟悉opencv里的方法函数(比如fps计算和不同输入流的整合)。实际项目中建议将代码复制出来二次开发较好,不建议在项目中使用不维护的项目。
在代码方面可以优化的地方还是较多的.
比如dense的detect双重循环,用推导表达式更好
for x in range(0, img.shape[1], self.step):
for y in range(0, img.shape[0], self.step):
# create a keypoint and add it to the keypoints list
kps.append(cv2.KeyPoint(x, y, self.radius))
=>
[cv2.KeyPoint(x,y) for x in range(0, img.shape[1], self.step) for y in range(0, img.shape[0], self.step)]
再比如:
def FeatureDetector_create(method):
method = method.upper()
if method == "DENSE":
return DENSE()
elif method == "GFTT":
return GFTT()
elif method == "HARRIS":
return HARRIS()
return cv2.FeatureDetector_create(method)
由于算法本身是无状态的.所以采用提前建立map("HARRIS":HARRIS)的方式可能更好。
并且其类名命名也不规范,有全部大写的类名,全部大写一般出现在枚举类中等类静态配置型变量中。
参考¶
imutils:https://blog.csdn.net/zimiao552147572/article/details/105919440
imutils–图像处理工具包:https://www.lizenghai.com/archives/25637.html
imutils库源码解析,看它如何调用opencv(一)- 基本函数:www.xiaoheidiannao.com/71631.html